
Abstract
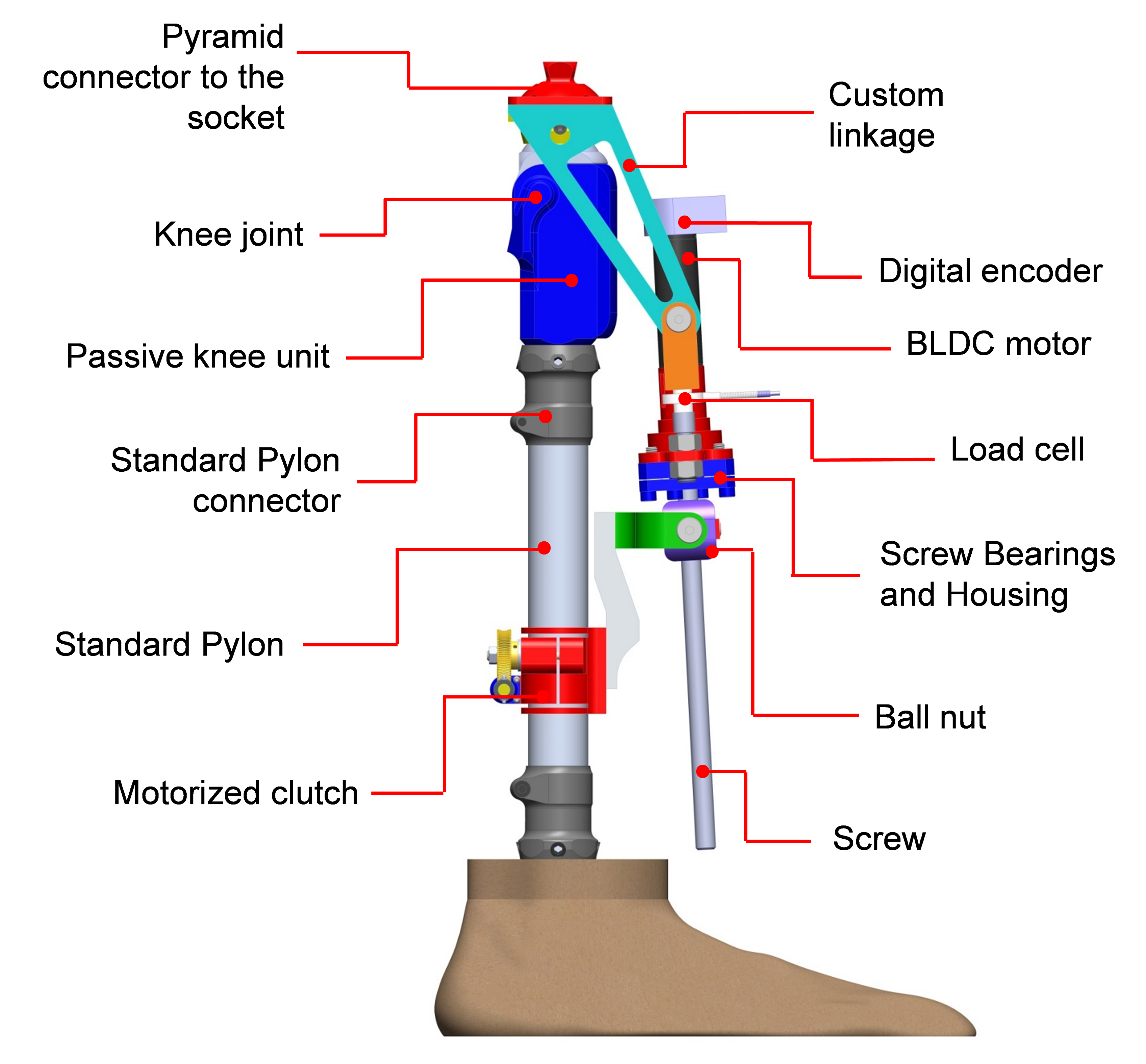
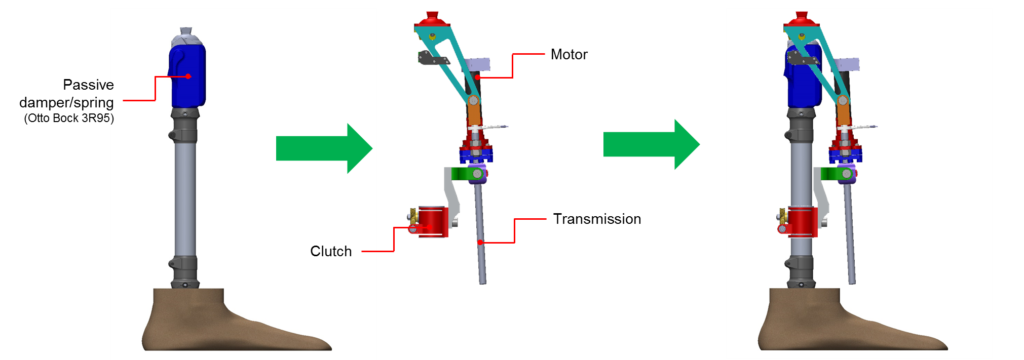
We designed a robotic system that can transform a conventional passive prosthesis into a powered robotic leg, thus allowing transfemoral amputees to perform activities that would not have been possible with their prescribed passive prostheses, such as climbing stairs. The Robotic Retrofit Prosthesis comprises two main functional elements: (1) a powertrain, which includes the motor and the primary transmission system, and (2) a motorized clutch that engages the motor and the primary transmission system during activities that require positive power such as standing up from a seated position or climbing stairs.
Bench-top testing – Motorized clutch
https://youtu.be/utHhHkwHXRA
Preliminary validation with an able-bodied subject
https://youtu.be/rFSVWvTYHmw
In Collaboration with Drs. Levi Hargrove and Todd Kuiken at the Rehabilitation Institute of Chicago