
February 11, 2026 – Andrew Gunnell’s paper was selected for Communications Engineering (Nature Portfolio) Editors’ Choice Award 2025
Our paper, “Powered knee exoskeleton improves sit-to-stand transitions in stroke patients using electromyographic control,” was selected as one of Communications Engineering’s Editors’ Choice Award recipients of 2025! Read the Editors’ Choice article here, and read the open-access paper here!
November 28, 2025 – New paper about our novel torque-sensitive actuator published in The International Journal of Robotics Research
Our new paper, “A low-noise low-impedance powered knee prosthesis with direct ball screw drive and torque-sensitive actuation” was published in the International Journal of Robotics Research (IJRR). Brendon Ortolano is the first author. Read the open-access paper here!
October 13, 2025 – New paper about our powered ankle exoskeleton is published in Transactions on Medical Robotics and Bionics
Our new paper, “A Lightweight, Fully Integrated Ankle Exoskeleton With High-Torque Density Series-Elastic Actuation”, was published in Transactions on Medical Robotics and Bionics (TMRB). Sergei Sarkisian is the first author. Read the open-access paper here!
September 26, 2025 – Dr. Lenzi gives plenary talk about Robotics at the Western Occupational Health Conference 2025
Dr. Tommaso Lenzi was a headline speaker for the Western Occupational Health Conference 2025 in SLC, UT. See the full program here (pdf)
August 11, 2025 – Greta Scheidt joins the HGN Lab!
New Master’s student Greta Scheidt joined the HGN Lab! Greta received her BS in Biomedical Engineering from the University of Wisconsin-Madison and is originally from Columbia, Missouri. As an undergrad, Greta worked in a cartilage biomechanics lab where she fell in love with biomechanics and discovered a motivation to make a meaningful, personal impact on mobility. In the lab, Greta will focus on developing novel EMG-based control methods for powered lower limb prosthetics. Welcome, Greta!
August 8, 2025 – Mary Clancy joins the HGN Lab!
New Master’s student Mary Clancy joined the HGN Lab! She graduated from the University of Utah with a BS in Mechanical Engineering and a minor in Computer Science in May 2025. She grew up in Jackson, WY. She will be working on control algorithms for a powered ankle prosthesis. Welcome, Mary!
August 6, 2025 – Dr. Lenzi gave a virtual presentation at NIH conference Rehabilitation Research 2025: Rehabilitation for All
Dr. Lenzi presented at the National Institute of Health (NIH) conference, Rehabilitation Research 2025: Rehabilitation for All. You can watch the full video here! Dr. Lenzi’s presentstarts at 4:34:34.
August 4, 2025 – New paper is published in Transactions on Neural Systems and Rehabilitation Engineering
Our new paper, “Unified Control of a Powered Knee-Ankle Prosthesis Enables Walking, Stairs, Transitions, and Other Daily Ambulation Activities”, was published in Transactions on Neural Systems and Rehabilitation Engineering (TNSRE). Liam Sullivan is the first author. Read the open-access paper here.
July 29, 2025 – New paper is published in IEEE ACCESS
Our new paper, “A Biomechanical Analysis of Weighted Lifting With an Active Knee Exoskeleton”, was published in IEEE ACCESS. Margaret Meagher is the first author. Read the open-access paper here.
June 13, 2025 – Dante Archangeli defends his PhD Dissertation!
Dante Archangeli successfully defended his PhD Dissertation! His dissertation was titled “Design and Validation of a Powered Two-Degree of Freedom Hip Exoskeleton and Open-Source Low-Cost Powered Knee Prosthesis.” His committee members were Dr. Tommaso Lenzi, Dr. Jake Abbott, Dr. Haohan Zhang, Dr. Sandy Meek, and Dr. Bo Foreman. Dante is the first graduate from the University of Utah’s new Robotics PhD program! Congratulations, Dante!
June 13, 2025 – Gwyn O’Sullivan receives NSF GRFP Fellowship!
PhD student Gwyn O’Sullivan has received the National Science Foundation Graduate Research Fellowship Program (NSF GRFP) fellowship. Gwyn will focus on creating new “semi-active” prosthetic foot designs to improve mobility in lower-limb amputees. Read more here.
June 7, 2025 – New paper is published in Nature Communications Engineering
Our new paper, “Powered knee exoskeleton improves sit-to-stand transitions in stroke patients using electromyographic control”, was published in Nature Communications Engineering. Andrew Gunnell is the first author. Read the open-access paper here.
May 20-23, 2025 – HGN graduate students present at ICRA 2025
At ICRA 2025, Brendon Ortolano presented “A Torque-Dense Low-Impedance Powered Knee Exoskeleton with Torque-Sensitive Actuation and Direct Ball-Screw Drive”. Jesse Prime presented “Design and Implementation of a Low-Profile Hip Exoskeleton for Ergonomics Assistance in Lifting and Ambulation”. Kai Pruyn presented “A Lightweight, Fully Integrated Ankle Exoskeleton with High-Torque Density Series-Elastic Actuation”.
May 12-15, 2025 – HGN graduate students present at ICORR 2025
At ICRA 2025, Marissa Cowan presented “Active Knee Prosthesis Improves Walking Economy in Individuals with a Transfemoral Amputation”, Liam Sullivan presented “A Biologically-Inspired Unified Controller for Powered Knee and Ankle Prosthesis Control in Real-World Ambulation”, Clare Severe presented “A Step Up: Powered Prosthetic Energy Modulation During Stair Ambulation”, Vishnu Subra Mani presented “A Semi-Active Ankle Prosthesis for Walking and Stair Ambulation”, Andy Gunnell presented “Balance and Recovery Strategies in Above-Knee Amputees: A Case Study on Waist Perturbations Using a Cable-Driven System”. Tommaso Lenzi and Rosie Murray attended.
May 2025 – R01 Grant Renewed!
Our R01 Grant from the National Institute of Health was renewed! The grant is titled “Lightweight Powered Prosthesis for Above-knee Amputees”. We are excited to continue this groundbreaking research.
Summer 2025 – Tim Dixon becomes a graduate student in the HGN Lab!
Tim Dixon joined the HGN lab in December 2024 as an undergraduate researcher. This summer, he decided to pursue a PhD in the HGN Lab! We are thrilled to keep him around. Tim grew up in Utah and did his undergraduate degree in Mechanical Engineering at the University of Utah. He will work on the next generation of 2-DOF hip exoskeleton. Before joining the HGN lab, he worked in the Utah Head Trauma Lab and the Dynamic Autonomous Robotic Control Lab.
Summer 2025 – Elise Nielsen becomes a graduate student in the HGN Lab!
Elise Nielsen joined the HGN Lab in early 2023 as an undergraduate researcher working on the U-Build Bionic Knee, an open-source powered knee prosthesis! Elise decided to pursue a graduate degree in the HGN Lab! She is currently an MS student and plans to pursue a PhD with the lab. We are so happy she’s sticking around! Elise grew up in Utah and did her undergraduate degree in Mechanical Engineering at the University of Utah. She is studying the biomechanics of ramp descent with the Utah Bionic Knee.
May 9, 2025 – Margaret Meagher defends her Master’s of Science Thesis
Margaret Meagher successfully defended her Master’s Thesis! Her thesis was titled, “A Biomechanical Analysis of Weighted Lifting with an Active Knee Exoskeleton.” Her committee members were Dr. Tommaso Lenzi, Dr. Haohan Zhang, and Dr. Bo Foreman. Congratulations, Margaret!
April 23, 2025 – Karen Walker receives NSF GRFP Fellowship!
PhD student Karen Walker has received the National Science Foundation Graduate Research Fellowship Program (NSF GRFP) fellowship. Karen will focus on the biomechanical impacts of our powered knee-ankle prosthesis, the Utah Bionic Knee, during ambulation. Congratulations Karen! Read more here.
April 12, 2025 – Gwyn O’Sullivan wins best poster award at RMASB 2025
PhD student Gwyn O’Sullivan won an award for “Best Doctoral Student Poster” at the 15th annual Rocky Mountain American Society of Biomechanics (RMASB) meeting. Gwyn’s poster focused on a new prosthetic foot design. Read more here.
April 12, 2025 – Elise Nielsen wins best poster award at RMASB 2025
Undergraduate student Elise Nielsen won an award for “Best Undergraduate Student Poster” at the 15th annual Rocky Mountain American Society of Biomechanics (RMASB) meeting. Elise’s poster focused on ramp descent with the Utah Bionic Knee. Congratulations Elise!
April 11-12, 2025 –15th annual Rocky Mountain American Society of Biomechanics (RMASB) meeting – Dr. Lenzi Co-Organized the conference and many HGN Lab students presented
Dr. Lenzi co-organized the 2025 RMASB conference with Alena Grabowski and Cara Welker from the University of Colorado, Boulder, and several HGN Lab students attended and presented! Andy Gunnell presented “Frontal plane assistance with a hip exoskeleton reduces hip torque in a transfemoral amputee during treadmill walking: a case study”, Elise Nielsen presented “Effects of varying prosthesis knee damping during ramp descent in transfemoral amputees”, Clare Severe presented “Increasing ankle range of motion and energy dissipation during stair descent with a powered ankle prosthesis in one transfemoral amputee”, Gwyn O’Sullivan presented “Improving push-off power in a passive prosthetic ankle with an articulated toe joint”, Karen Walker presented “Replicating early stance knee flexion in transfemoral amputees with an active knee prosthesis”, and Marissa Cowan presented for Owen Winship who was sick, “Balance and recovery strategies in above-knee amputees: a case study on waist perturbations using a cable-driven system”.
March 25, 2025 – New paper published in IEEE Transactions on Robotics
Our new paper, “A Lightweight Powered Hip Exoskeleton With Parallel Actuation for Frontal and Sagittal Plane Assistance”, was published in IEEE Transactions on Robotics. Dante Archangeli is the first author. Read more here.
November 7, 2024 – HGN Lab Undergrads win NIH DEBUT Challenge with U-Build Bionic Knee
HGN Lab undergraduates Elise Nielsen, Teddy (Elanor) Stevens, and Duncan Stewart-Jackson won the NIH Design by Biomedical Undergraduate Teams (DEBUT) challenge with their U-Build Bionic Knee project! Congratulations, team! Read more here.

October 28th, 2024 – HGN Lab wins the U’s Breakthrough of the Year Award!
The Utah Bionic leg, entirely developed by graduate students in the HGN Lab for Bionic Engineering was named the Breakthrough of the Year from the University of Utah Technology Licensing Office of the University of Utah. This prestigious award recognizes an invention or discovery that has created a meaningful difference in society. Recipient teams or individuals have successfully developed and commercialized an invention that improves lives in real-world use and creates economic impact. Congratulations HGN Lab!
You can read more here: Technology Licensing Office at the University of Utah – University of Utah announces 2024 Innovation Awards recipients
{kind=link}
September 21st, 2024 – HGN Lab members present and receive awards at UBEC
Eleven undergraduate, Master’s, and PhD students from the HGN Lab for Bionic Engineering presented their work at the annual Utah Biomedical Engineering Conference. Elise Nielsen (undergraduate student in Mechanical Engineering) received the second-place poster presentation award for her work titled “Effects of Varying Prosthesis Knee Damping During Ramp Descent in Transfemoral Amputees: A Case Study”. Kai Pruyn (PhD student in Robotics) received second place Podium Presentation Award for the work titled “Autonomous Powered Ankle Exoskeleton Improves Foot Clearance and Knee Hyperextension After Stroke: A Case Study”. Great job Elise and Kai!!!
{kind=link}
September 5th, 2024 – Vincent Boon successfully defended his Master’s Thesis!
Visiting MS student Vincent Boon successfully defended his Master’s Thesis, titled “THE ONLY WAY IS UP: ACTIVE KNEE EXOSKELETON REDUCES MUSCULAR EFFORT IN QUADRICEPS DURING WEIGHTED STAIR ASCENT”. The international thesis committee included HGN Lab director prof. Tommaso Lenzi, prof. dr. ir. M. Sartori, dr. E.H.F. van Asseldonk, and dr. ir. W.B.J. Hakvoort from the University of Twente (The Netherlands). Congratulations Vincent!
{kind=link}
September 1st-4th, 2024 – HGN Graduate Students present at BioRob 2024 in Heidelberg, Germany
PhD students Kai Pruyn, Brendon Ortolano, and Dante Archangeli presented the results of their ongoing research at the IEEE RAS EMBS 10th International Conference on Biomedical Robotics and Biomechatronics (BioRob 2024). Kai presented “Autonomous Powered Ankle Exoskeleton Improves Foot Clearance and Knee Hyperextension After Stroke: A Case Study”. Brendon presented “Mechatronic Design of a Direct-Ball Screw Drive Knee Prosthesis with Torque Sensitive Actuation”. Dante presented “Design and Evaluation of a Powered Hip Exoskeleton for Frontal and Sagittal Plane Assistance” Good job, HGN Team!
{kind=link}
August 15th, 2024 – New $1.5M grant from the Department of Defense (DOD)
Prof. Tommaso Lenzi (PI) received a new grant from the Congressionally Directed Medical Research Program (CDMRP) of the Department of Defense (DOD). This 4-year, $1.5M grant will support the development and testing of a new high-performance powered ankle/foot prosthesis for individuals with transtibial amputations. We are excited to start this new research and will start recruiting for this project soon.
August 1st, 2024 – Grace Hunt successfully defended her PhD Thesis!
PhD student Grace Hunt successfully defended her PhD Thesis. Her PhD dissertation, titled “Powered prosthesis control during functional mobility task,” was approved by committee members Drs. Tommaso Lenzi (Mechanical Engineering), Jake Abbott (Mechanical Engineering), Kenneth K Foreman (Physical Therapy), Sanford Meek (Mechanical Engineering), and Colby Hansen (Physical Medicine and Rehabilitation). Congratulations Dr. H!
July 30th, 2024 – New Patent on Powered Exoskeletons Granted by the US Patent Office
HGN Lab Director Tommaso Lenzi, current PhD student Dante Archangeli, and former PhD student Sergei Sarkisian were officially granted a patent by the US Patent Office. The patent is titled “SELF-ALIGNING MECHANISMS IN PASSIVE AND POWERED EXOSKELETONS”. Congratulations inventors!
July 1st, 2024 – Gwyn O’Sullivan joins HGN Lab
April 12th, 2024 – Best Presentation Award at NORA 2024
PhD student Kai Pruyn won the Best Presentation Award at the 22nd Annual Regional NORA Young/New Investigators Symposium. Her presentation covered the use of lightweight powered exoskeletons to improve and preserve the safety and health of workers in physically demanding jobs.
April 11, 2024 – Kai Pruyn receives NSF GRFP fellowship
PhD student Kai Pruyn received the prestigious National Science Foundation (NSF) Graduate Research Fellowships Program (GRFP) fellowship. Kai joined the HGN Lab for Bionic Engineering as a freshman undergraduate researcher. This fellowship will support her during her PhD in the lab, focused on using exoskeletons to improve mobility in individuals who have had a stroke. Read more here.
April 5th, 2024 – Best Poster Award at RMASB 2024
Master student Margaret Meagher won the Best Master Student Poster Award at the 9th Annual Meeting of the Rocky Mountain American Society of Biomechanics. The poster presented her ongoing work on the testing of a lightweight knee exoskeleton to assist gait in individuals with hemiparesis.
Feb 26, 2024 – Minh Tran wins the 2023 ME Outstanding Dissertation Award.
Minh received the University of Utah Mechanical Engineering Department’s 2023 ME Outstanding Dissertation Award. His dissertation was titled “Variable Transmission Systems for Powered Knee Prostheses.” Minh joined the lab in Fall 2017 and graduated in Spring 2023. Minh is currently a Mechanical Engineer at Agility Robotics in Corvallis, Oregon.
January 10th, 2024 – Prof. Lenzi named U Presidential Scholar
Professor Lenzi, Director of the HGN Lab, has been named 2023 Presidential Scholar at the University of Utah. This award recognizes excellence and achievement for faculty members at the assistant or associate professor level and comes with annual funding for three years to support their scholarship and enrich their research activities.
Lenzi Named U Presidential Scholar – Mechanical Engineering | University of Utah
October 24th, 2023 – Our prosthesis work featured in Science Robotics
Our recent paper about stand-to-sit transitions with a powered knee-ankle prosthesis was selected as Editors’ Choice in Science Robotics last month!
A powered prosthesis supports weight-bearing stand-to-sit transitions | Science Robotics
October 24th, 2023 – We Made the TIME!
The Utah Bionic Leg is one of TIME’s 2023 Best Inventions! Utah Bionic Leg: The 200 Best Inventions of 2023 | TIME
October 16th, 2023 – New paper published in Cambridge Wearable Technologies
In this study, we present the design, development, and testing of a novel SEA with high force density for powered exoskeletons, as well as the use of a two-degree-of-freedom (2DOF) PID system to improve output impedance and disturbance rejection. Results show that our 2DOF PID controller substantially reduces the output impedance and damping values compared to a 1DOF PID controller. Human experiments show improved torque tracking with reduced root-mean-square error by 45.2% and reduced peak error by 49.8%. The manuscript is freely available at this link: Series-elastic actuator with two degree-of-freedom PID control improves torque control in a powered knee exoskeleton | Wearable Technologies | Cambridge Core
October 1-5, 2023 – Four Paper Contributions and One Full-day Workshop to be presented at IROS 2023 in Detroit
Liam Sullivan will present on “Powered Knee and Ankle Prosthesis Control for Adaptive Ambulation at Variable Speeds, Inclines, and Uneven Terrains“. Suzi Creveling will present on “Volitional EMG Control Enables Stair Climbing with a Robotic Powered Knee Prosthesis“. Marissa Cowan will present on “A Unified Controller for Natural Ambulation on Stairs and Level Ground with a Powered Robotic Knee Prosthesis“. Brendon Ortolano will demonstrate a lightweight powered knee exoskeleton with torque-sensitive transmission during the main demonstration session. Prof. Lenzi is the main organizer of a full-day workshop titled “State of the Art in Robotic Leg Prostheses: Where We Are and Where We Want to Be“.
August 1st, 2022 – New $1.7M grant from the National Institute for Occupational Safety and Health (NIOSH)
Prof. Tommaso Lenzi received a new grant from the National Institute for Occupational Safety and Health (NIOSH). This grant will support the Ergonomics and Safety program at the University of Utah, and it is part of a larger Education and Research Center (ERC) grant award by NIOSH to the Rocky Mountain Center for Occupational and Environmental Health (RMCOEH).
July 30th, 2023 – President Randall visits the HGN lab for Bionic Engineering
Taylor Randall, 17th President of the University of Utah, visited our lab to meet our students and talk about research projects. During the visit, President Randal had an opportunity to learn more about the Utah Bionic Leg, and to participate in live demonstrations of our lightweight powered exoskeletons.
{kind=link}
July 10th, 2023 – New paper published in IEEE Transactions on Biomedical Engineering
Volitional control systems for powered prostheses require the detection of user intent to operate in real-life scenarios. Ambulation mode classification has been proposed to address this issue. However, these approaches introduce discrete labels to the otherwise continuous task which is ambulation. An alternative approach is to provide users with direct, voluntary control of the powered prosthesis motion. In this study, we show that a small and lightweight A-mode ultrasound system can continuously predict prosthesis joint kinematics in seven individuals with transfemoral amputation across different ambulation tasks. Features from the A-mode ultrasound signals were mapped to the user’s prosthesis kinematics via an artificial neural network. This study lays the foundation for future applications of A-mode ultrasound for volitional control of powered prostheses during a variety of daily ambulation tasks. The manuscript is freely available at this link: Continuous A-Mode Ultrasound-Based Prediction of Transfemoral Amputee Prosthesis Kinematics Across Different Ambulation Tasks | IEEE Journals & Magazine | IEEE Xplore
May 2nd, 2023 – New paper published in Springer Nature Journal of NeuroEngineering and Rehabilitation
Passive prostheses are able to dissipate limited amounts of energy using resistive damper systems during “negative energy” tasks like sit-down. Consequently, users are forced to over-compensate with their upper body, residual hip, and intact leg. In contrast, powered prosthetic joints are controlled by motors, which can produce higher levels of resistance at a larger range of joint positions than passive damper systems. In this study, we found that a powered knee-ankle prosthesis significantly improved weight-bearing symmetry during sit-down compared to passive prostheses. However, we did not observe a corresponding decrease in intact-limb muscle effort. These results indicate that powered prosthetic devices have the potential to improve balance during sit-down for individuals with above-knee amputation and provide insight for future development of powered prosthetics. The manuscript is freely available at this link: Can a powered knee-ankle prosthesis improve weight-bearing symmetry during stand-to-sit transitions in individuals with above-knee amputations? | Journal of NeuroEngineering and Rehabilitation | Full Text (biomedcentral.com)
February 24th, 2023 – New paper published in IEEE Transactions on Neural Systems and Rehabilitation Engineering
Lower-limb-powered prostheses can provide users with volitional control of ambulation. To this end, they require a sensing modality that reliably interprets user intention to move. Ultrasound has been shown to have better resolution and specificity than surface EMG. However, this technology has yet to be integrated into lower-limb prostheses. In this paper, we show that A-mode ultrasound sensing can reliably predict the prosthesis walking kinematics of individuals with a transfemoral amputation. Ultrasound features from the residual limb of 9 transfemoral amputee subjects were recorded with A-mode ultrasound during walking with their passive prosthesis. The manuscript is freely available at this link: A-Mode Ultrasound-Based Prediction of Transfemoral Amputee Prosthesis Walking Kinematics via an Artificial Neural Network | IEEE Journals & Magazine | IEEE Xplore
February 15th, 2023 – New paper published in MDPI Actuators
Torque-sensitive transmissions have emerged as promising solutions to meet this need by significantly increasing actuator efficiency and power density, but their modeling and analysis remain an open research topic. In this paper, we introduce the sensitivity between input displacement and output torque as a key metric to analyze the performance of these complex mechanisms in dynamic tasks. Our results show that sensitivity analysis is a valuable tool for designers to systematically analyze and create transmission systems capable of human-like physical behavior. The manuscript can be downloaded freely at this link: Actuators | Free Full-Text | Analysis and Validation of Sensitivity in Torque-Sensitive Actuators (mdpi.com)
December 1st, 2022 – New paper published in MDPI Sensors
For this study, seven transfemoral amputee subjects walked on an ambulation circuit while wearing A-mode ultrasound transducers, IMU sensors, and their passive prosthesis. Our results show that A- mode ultrasound can classify ambulation mode with comparable, and in some cases, superior accuracy to mechanical sensing.his suggests that A-mode ultrasound provides additional useful information about the user’s gait beyond what is provided by mechanical sensors, and that it may be able to improve ambulation mode classification. The manuscript can be downloaded freely at this link: Sensors | Free Full-Text | Ambulation Mode Classification of Individuals with Transfemoral Amputation through A-Mode Sonomyography and Convolutional Neural Networks (mdpi.com)
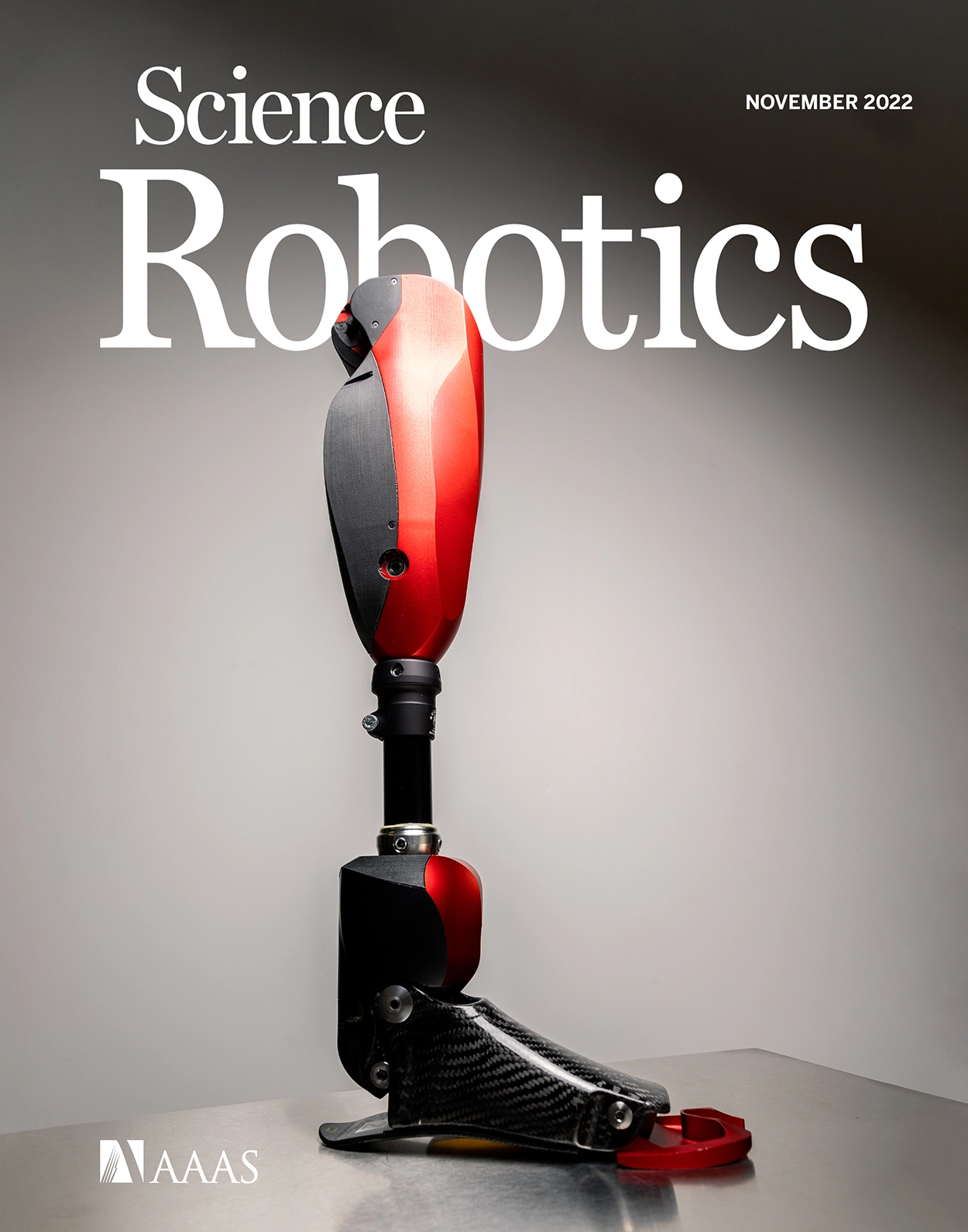
November 23rd, 2022 – The Utah Bionic Leg is on the Cover of Science Robotics
In this paper, we describe the design, development, and testing of the latest generation of the Utah Bionic Leg, our robotic leg prosthesis for individuals with above-knee amputation. This bionic leg has active (powered) knee, ankle, and toe joints, empowering natural ambulation on level ground and stairs. It weighs the same as passive microprocessor-controlled prostheses. It can walk indefinitely w.o. charging the battery in passive mode and is designed to satisfy ISO standards. You can see the magazine cover here. The manuscript can be downloaded at this link: A lightweight robotic leg prosthesis replicating the biomechanics of the knee, ankle, and toe joint | Science Robotics
{kind=link}
October 14th, 2022 – New paper published in IEEE Transactions on Neural Systems and Rehabilitation Engineering (IEEE TNSRE)
In this study, we show that varying the assistive knee torque provided by a powered knee prosthesis significantly improved weight-bearing symmetry, effort, and speed during the stand-up movement in eight above-knee amputees. Specifically, we observed improvements in the index of asymmetry of the vertical ground reaction force at the point approximating maximum vertical center of mass acceleration, the integral of the intact vastus medialis activation measured using electromyography, and the stand-up duration compared to the passive prosthesis. These results show that powered prostheses can improve functional mobility, potentially increasing quality of life for millions of people living with above-knee amputations. The manuscript can be downloaded freely at this link: Effect of Increasing Assistance from a Powered Prosthesis on Weight-Bearing Symmetry, Effort, and Speed during Stand-Up in Individuals with Above-Knee Amputation | IEEE Journals & Magazine | IEEE Xplore
October 5th, 2022 – Ottobock Acquires our Powered Prosthesis Technology and Provides Naming Donation
Ottobock, the world leader in prosthetics, licensed the technology behind the Utah Bionic Leg and signed a partnership agreement for the co-development of robotic prostheses for individuals with lower-limb amputation. To support this research effort, Professor Nader (owner and chairman of Ottobock) has provided a naming donation for our lab, which is now officially named the HGN Lab for Bionic Engineering. You can learn more about it here and here.
October 4th, 2022 – New paper published in IEEE Transactions on Biomedical Engineering (IEEE TBME)
In this study, we assess the biomechanics of eight individuals with above-knee amputations walking with and without a unilateral, lightweight powered hip exoskeleton. We found that the powered hip exoskeleton assistance significantly reduced the net residual hip energy, with concentric energy being the main contributor to this change. This analysis shows that by assisting the residual hip, the exoskeleton significantly decreased the net hip energy produced by the residual limb, which may explain the improvements in walking economy previously observed. The manuscript can be downloaded freely at this link: Powered Hip Exoskeleton Reduces Residual Hip Effort without Affecting Kinematics and Balance in Individuals with Above-Knee Amputations During Walking | IEEE Journals & Magazine | IEEE Xplore
September 30th, 2022 – New $1.5M grant from the Department of Defense
Prof. Tommaso Lenzi received a new grant from the Peer Reviewed Orthopaedic Research Program (PRORP) of the Congressionally Directed Medical Research Program (CDMRP) within the Department of Defense. The grant title is “Motorized Hip Orthosis for Individuals with Transfemoral Amputations”. The goal of this project is to develop and validate a new motorized hip orthosis for use by individuals with transfemoral amputation during challenging locomotor tasks. This new motorized orthosis will assist the user’s hip both in flexion/extension and abduction/adduction, which is expected to provide substantial improvements in gait efficiency, stability, and balance.
September 14th, 2022 – New paper published in Scientific Report by Nature
In this paper, we show that powered prostheses can restore natural leg movements, enabling the individual with bilateral above-knee amputation to walk and climb stairs using different gait patterns, such as step-over-step or step-by-step, one step or two steps at a time. This case study is a first step towards enhancing functional mobility and quality of life for individuals with bilateral above-knee amputations through powered knee and ankle prostheses. The manuscript can be downloaded freely at this link: Powered knee and ankle prostheses enable natural ambulation on level ground and stairs for individuals with bilateral above-knee amputation: a case study | Scientific Reports (nature.com)
August 17th, 2022 – Minh Tran wins ASME Design Competition
Congratulations to Ph.D. student Minh Tran, a Ph.D. student in the Bionic Engineering Laboratory, for winning the 2022 ASME Student Mechanism and Robot Design Competition (SMRDC). The competition provides an opportunity for students to showcase their ability to design and build a mechanism or robot. This year, it attracted teams from universities across the U.S., as well as Europe and Asia. The SMRDC takes place as part of the ASME 2022 International Design Engineering Technical Conference (IDETC), which focuses on emergent technologies that impact the critical engineering issues of product design, development, and manufacturing. Read more here.
August 1st, 2022 – Dr. Lenzi nominated Acting Director of the Ergonomics and Safety Program at the University of Utah
Dr. Lenzi was nominated Acting Director of the Ergonomics and Safety Program. The E&S Program is funded by the Rocky Mountain Center for Occupational and Environmental Health (RMCOEH), which is one of only two ERCs in NIOSH Region 8 (UT, CO, WY, MT, ND, and SD). The E&S Program provides students and trainees from multiple disciplines with university courses in ergonomics, human factors, biomechanics, industrial safety, system safety, and product safety.
July 26th, 2022 – Sergei Sarkissian and Dante Archangeli present at the 2022 International Conference on Rehabilitation Robotics 2022
Sergei Sarkissian (Ph.D. Student) presented a work titled “Knee Exoskeleton Reduces Muscle Effort and Improves Balance During Sit-to-Stand Transitions After Stroke: A Case Study”.
Dante Archangeli (Ph.D. Student) presented a work titled “Assistive Powered Hip Exoskeleton Improves Self-Selected Walking Speed in One Individual with Hemiparesis: A Case Study” The papers are available on IEEExplore at the following links: Knee Exo study, Hip Exo study.
July 1st, 2022 – Dr. Lenzi promoted to Associate Professor with Tenure
Dr. Lenzi, Lab PI, was promoted to Associate Professor with Tenure in the Department of Mechanical Engineering at the University of Utah.
June 4th, 2022 – Rosemarie Murray receives a postdoctoral fellowship
Rosie Murray received a postdoctoral fellowship from the STARS TL1 program of the Clinical and Translational Institute at the University of Utah. This NIH-funded fellowship will enable Rosie to continue her training in clinical and translational science. She will work on powered hip exoskeletons for individuals with hemiparesis.
May 6th, 2022 – Suzi Creveling recognized as Undergraduate Research of the Year in Mechanical Engineering
Suzi Creveling (undergraduate student researcher) was the recipient of the Researcher of the Year Award in Mechanical Engineering at the University of Utah. The award was officially presented during the graduation ceremony. A photo of the award is available here.
{kind=link}
April 16, 2022 – New paper published in IEEE/ASME Transactions on Mechatronics (IEEE/ASME TMECH)
In this study, we present the design, development, and validation of an autonomous powered hip exoskeleton with the highest torque density in the field. The exoskeleton actuator is based on a four-bar mechanism with integrated composite springs. A compact carbon fiber frame encloses the custom actuator, doubling as the exoskeleton thigh linkage. A self-aligning mechanism is used to avoid uncomfortable spurious forces and torques on the user’s limb. The manuscript can be downloaded freely at this link: A Powered Hip Exoskeleton With High Torque Density for Walking, Running, and Stair Ascent | IEEE Journals & Magazine | IEEE Xplore
April 07, 2022 – Connelly Buchanan defends his Master of Science Thesis
Connelly Buchanan successfully defended his Master of Science thesis becoming the first student to graduate with a Master of Science in the Bionic Engineering Lab. His thesis titled “Design and development of a semi-active ankle/foot prosthesis powered by a lockable series-elastic actuator” describes the design and development of a new ankle/foot prosthesis that combines passive and powered operations in an innovative way.
April 4, 2022 – Kai Pruyn recognized at the Outstanding Undergraduate Researcher Award Ceremony
Kai Pruyn (undergraduate student researcher) was the recipient of the prestigious Dee Foundation Scholarship at the University of Utah. The fellowship was officially awarded at the annual Outstanding Undergraduate Researcher Award Ceremony organized by the University of Utah. The live stream of the event is available at this link. A photo of the award is available here.
{kind=link}
March 22, 2022 – New paper published in IEEE Transactions on Robotics (IEEE TRO)
In this study, we show a novel adaptive stair ascent controller that enables individuals with above-knee amputations to climb stairs of varying stair heights at their preferred cadence and with their preferred gait patterns, such as step-by-step, step-over-step, and two-step at the time. By improving robustness to environmental and human variance, we expect this controller will enable powered prostheses to more easily move from the lab to the real world, achieving their full potential. The manuscript can be downloaded freely at this link: Powered Knee and Ankle Prosthesis With Adaptive Control Enables Climbing Stairs With Different Stair Heights, Cadences, and Gait Patterns | IEEE Journals & Magazine | IEEE Xplore
March 21, 2022 – Hosting amputee support group
We are hosting the monthly meeting of the local amputee support group “Sky is the Limb’it”. During this meeting, the members of the Bionic Engineering Lab will showcase their research, providing live demonstrations of our powered exoskeletons and prostheses.
March 18, 2022 – New paper published in the Open Journal of NeuroEngineering and Rehabilitation ( JNER)
Our study in collaboration with Dr. Helen Huang, Jackson Family Distinguished Professor, Director of the Closed-Loop Engineering for Advanced Rehabilitation (CLEAR) Core at the North Carolina State University and the University of North Carolina, Chapel Hill was published in the Journal of NeuroEngineering and Rehabilitation. The study is titled “Is there a trade-off between economy and task goal variability in transfemoral amputee gait?” and provides new insights into the role of variability in amputee gait. The paper is based on our open dataset of amputee biomechanics. The manuscript is openly available online at this link. The open amputee dataset is available at this link.
March 4, 2022 – Invited Presentation at the 48th Annual Meeting and Scientific Symposium of the American Academy of Orthotists & Prosthetists
Dr. Lenzi was invited to present on the Utah Bionic Leg prosthesis at the 48th Annual Meeting and Scientific Symposium of the American Academy of Orthotists & Prosthetists in Atlanta, GA. In this talk, Dr. Lenzi described the open challenges in the powered prosthetics field highlighting the path that the Bionic Engineering Lab has taken to address them.
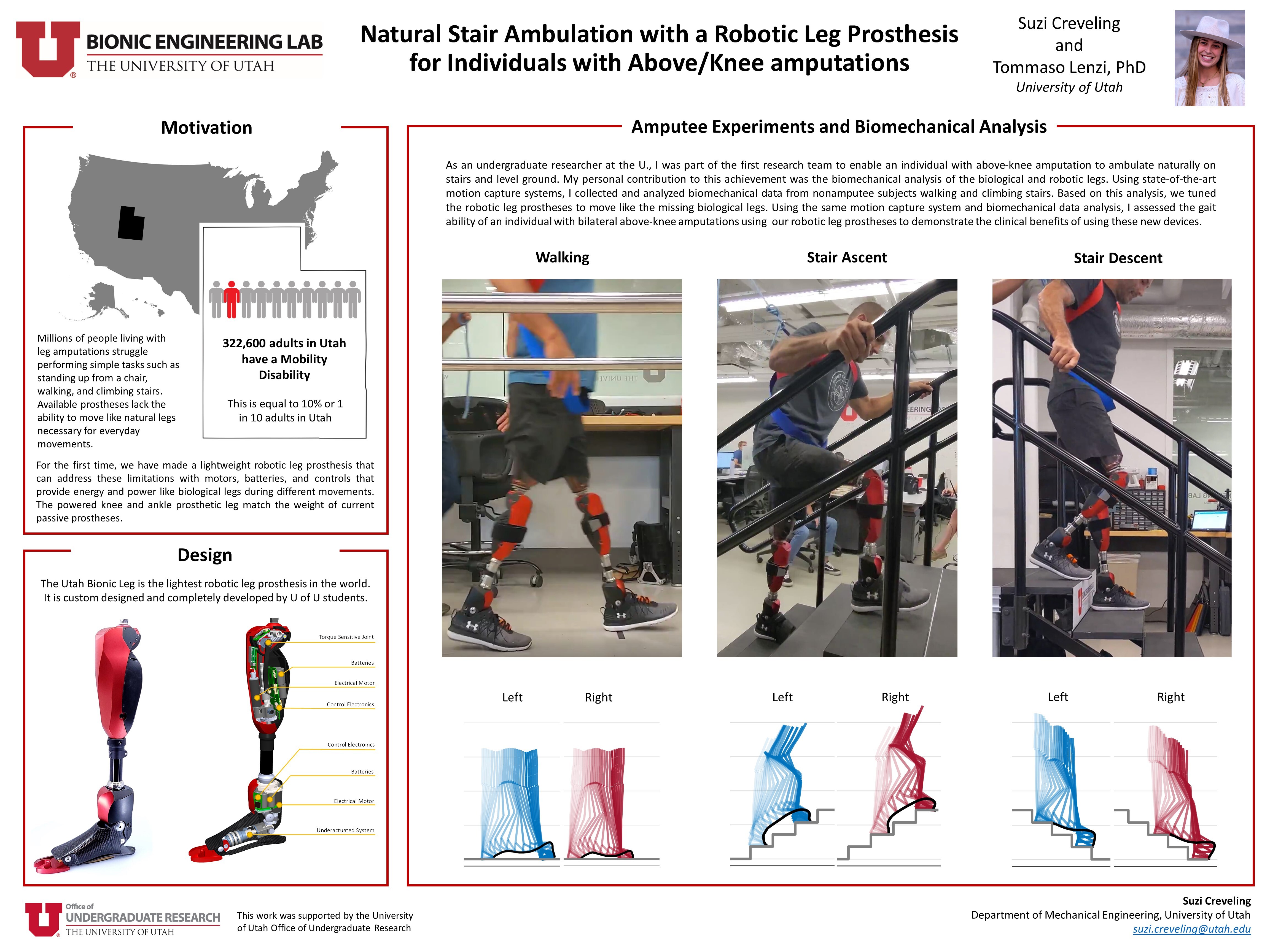
February 8, 2022 – Suzi Creveling presents her undergraduate research on Capitol Hill
Suzi Creveling was selected by the University of Utah Undergraduate Research Office to showcase her research to Utah lawmakers and the general public in the rotunda at the Utah State Capitol. Research on Capitol Hill is an annual event that gives lawmakers and the public a glimpse of the breadth of research programs at the U and reinforces the value of state-funded higher education. You can read Suzi’s poster here. More info on the event is available here.
{kind=link}
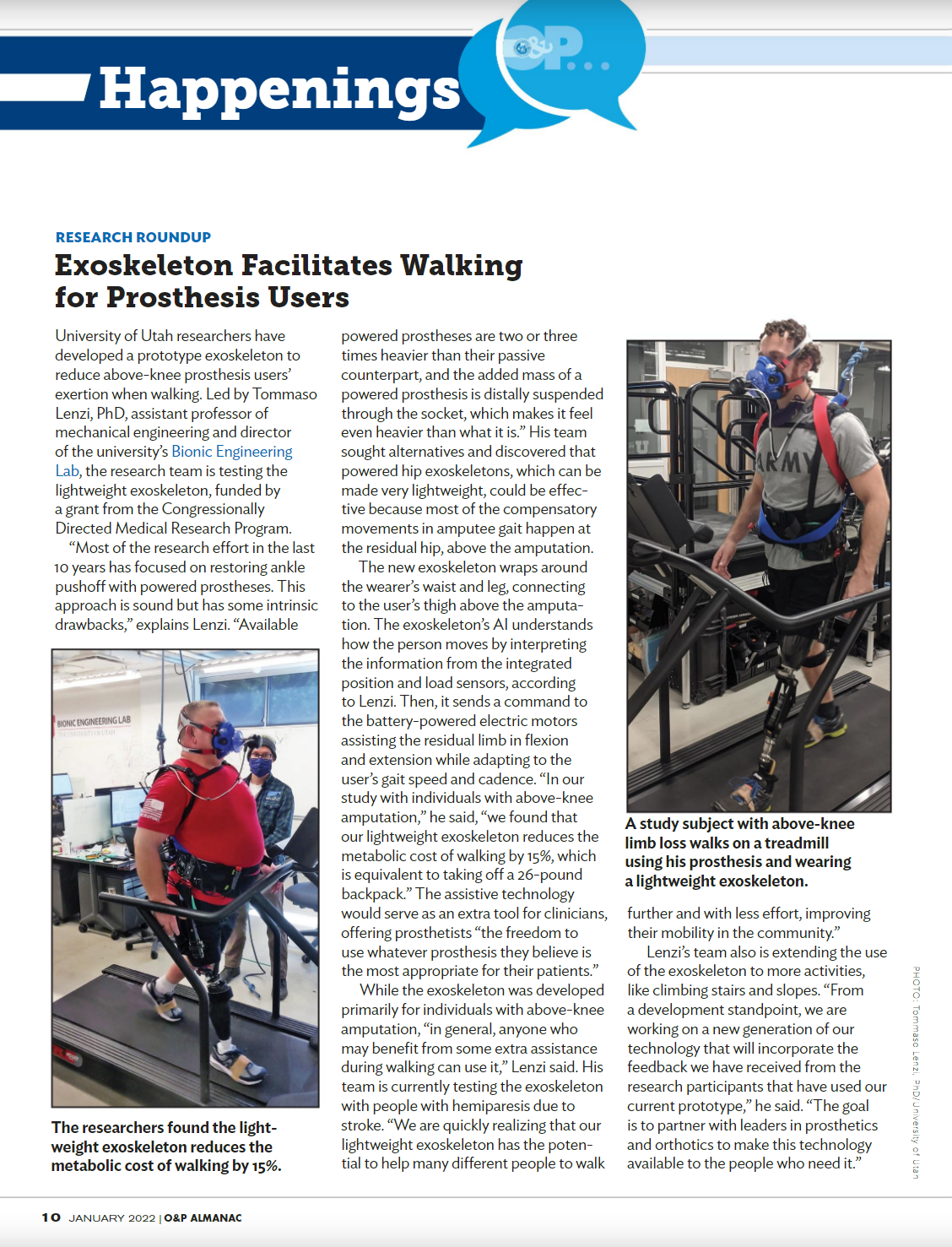
January 15, 2022 – Our Nature Medicine Study is Featured in the O&P Almanac
The O&P Almanac dedicated a full page of their January issue to our amputee study published in Nature Medicine. The O&P Almanac is the most respected source for industry insight and association news in the orthotic and prosthetic industry. Featured topics include emerging technologies, coding and reimbursement education, premier meetings, people and businesses in the news, and industry modernization. You can read the article here.
{kind=link}
January 12, 2022 – Dr. Rosemarie Murray joins the Bionic Engineering Lab as a Postdoctoral Associate
Dr. Rosemarie Murray joins the Bionic Engineering Lab as a Postdoctoral Associate to work on volitional control of powered prostheses, specifically focusing on control algorithms based on sonomyography and machine learning. Rosie obtained her Ph.D. in Mechanical Engineering from Columbia University in New York City, where she worked with Dr. Sunil Agrawal in The Robotics And Rehabilitation (RoAR) Lab.
January 04, 2022 – Lukas Gabert defends his PhD
Lukas Gabert successfully defended his Ph.D. becoming the first graduate of the Bionic Engineering Lab. His thesis titled “Lightweight and Biomimetic Powered Prosthesis” shows new elegant designs for ankle/foot prostheses that combine the efficiency and lightness of conventional devices with the power generation ability of robotic legs. Lukas will transition to an Engineering Manager position in the lab, taking the lead on all our technical projects.
December 02, 2021 – New paper published in IEEE Transactions on Neural System and Rehabilitation Engineering (TNSRE)
Our study in collaboration with Dr. Fey at the University of Texas at Austin was published in IEEE Transactions on Neural Systems and Rehabilitation Engineering. The study is titled “Performance of Sonomyographic and Electromyographic Sensing for Continuous Estimation of Joint Torque During Ambulation on Multiple Terrains” and demonstrates the first sonomyographic system and related machine learning algorithms capable of estimating joint torque online during different ambulation activities. We plan to use this algorithm for the control of our powered knee and ankle prosthesis. The manuscript is openly available online at this link.
November 15, 2021 – New paper published in Frontiers on Neurorobotics
Our study, titled “Robust Torque Predictions From Electromyography Across Multiple Levels of Active Exoskeleton Assistance Despite Non-linear Reorganization of Locomotor Output” was published in Frontiers in Neurorobotics. This study tests new control algorithms for powered exoskeletons based on electromyography (EMG) that can accommodate spatiotemporal changes in muscle activity have broad implications for exoskeleton-based assistance and rehabilitation following neuromuscular injury. The manuscript is openly available online at this link.
November 01, 2021 – New powered prosthesis presented at the 43rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society
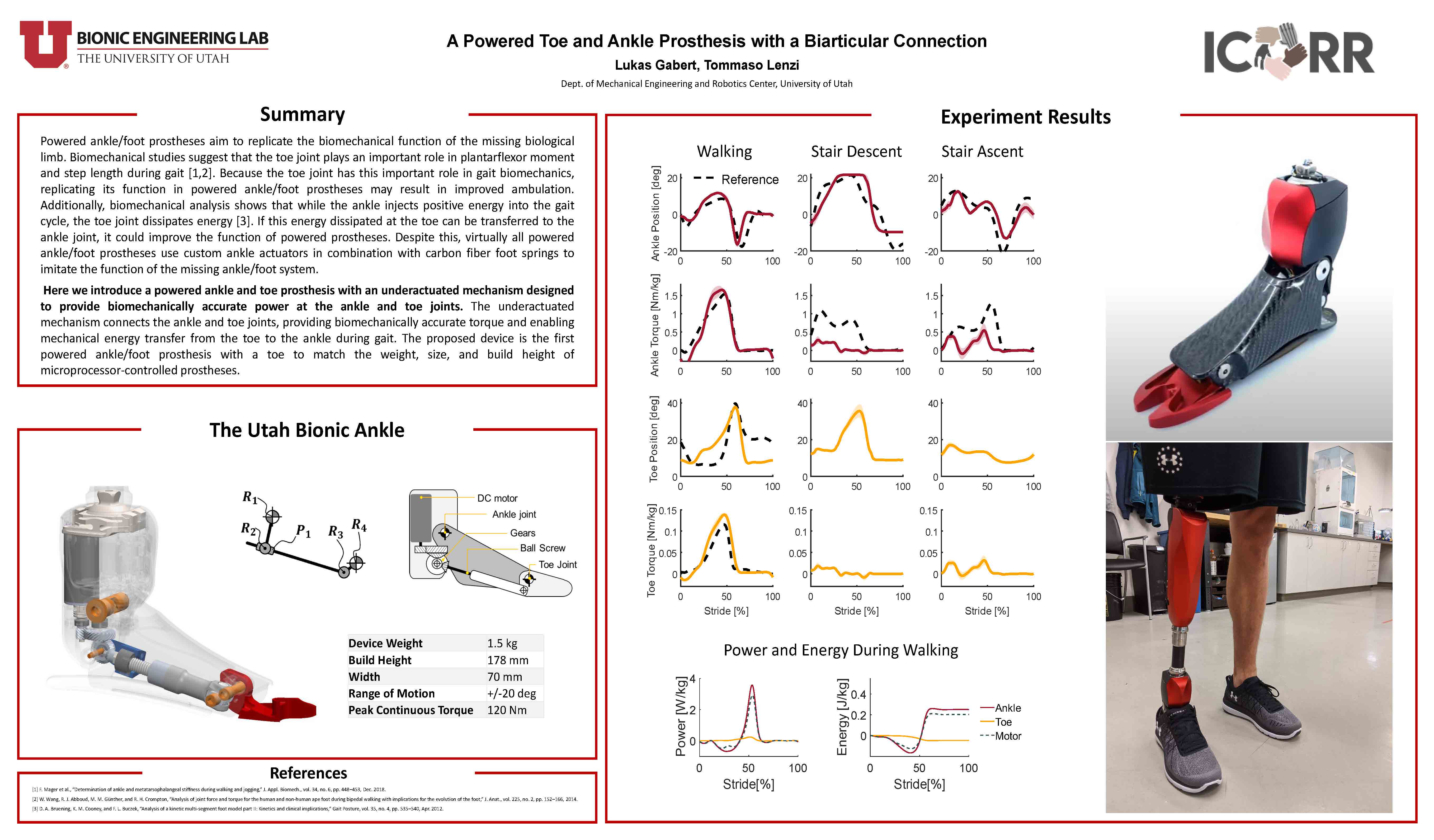
Lukas Gabert presented (virtually) the paper titled “Design of an Underactuated Powered Ankle and Toe Prosthesis” at the 43rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society. The paper presents the design and modeling of our newest lightweight powered ankle-foot prosthesis.
October 16, 2021 – New paper published in Nature Medicine
Our preclinical study is published in Nature Medicine. In this paper, we show that an autonomous powered hip exoskeleton assisting the residual limb significantly improves metabolic walking economy by 15.6 ± 2.9% (mean ± s.e.m.; two-tailed paired t-test, P = 0.002) in six individuals with above-knee amputation. The observed metabolic cost improvement is equivalent to removing a 12-kg backpack from a nonamputee individual. This is the first technology able to improve walking economy since the introduction of microprocessor-controlled prostheses in the 1990s. The manuscript is openly available online at this link.
September 24, 2021 – Six contributions presented at the International Conference on Rehabilitation Robotics (ICORR 2021)
- Lukas Gabert presented a study titled “A Powered Toe and Ankle Prosthesis with a Biarticular Connection” (more info)
- Sara Hood presented a study titled “Design and Amputee Testing of an Adaptive Stair Ascent Control for Powered Knee and Ankle Prostheses” (more info)
- Marshall Ishmael presented a study titled “Powered Hip Exoskeleton Increases Self-Selected Walking Speed in Stroke: A Case Study” (more info)
- Andy Gunnell presented a study titled “Powered Knee Exoskeleton With Proportional EMG Control Improves Sit-to-Stand Transition Symmetry in a Stroke Subject” (more info).
- Grace Hunt presented a study titled “Neural Control Enables Stand-Up, Squat, Lunge, and Walk With a Robotic Knee and Ankle Prosthesis” (more info)
- Minh Tran presented a study titled “A Lightweight, Compact Powered Knee Prosthesis with Elastic Torque-Sensitive Actuation” (more info)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
August 15, 2021 – Selena Cho receives National Science Foundation Graduate Research Fellowship
August 11, 2021 – New paper published in IEEE Open Journal of Engineering in Medicine and Biology
Our paper entitled “Stand-Up, Squat, Lunge, and Walk With a Robotic Knee and Ankle Prosthesis Under Shared Neural Control” was published in the IEEE Open Journal of Engineering in Medicine and Biology. In this paper, we show for the first time that a shared neural control approach combining neural signals from the user’s residual limb with robot control improves functional mobility in individuals with above-knee amputation. The manuscript is openly available online at this link.
July 12, 2021 – Invited Talk at IEEE/ASME International Conference on Advanced Intelligent Mechatronics
Dr. Lenzi presents the latest results of our powered prosthetics research at a workshop titled “Rehabilitation Using Robots: Past, Present, and Future”. The workshop is part of the 2021IEEE/ASME International Conference on Advanced Intelligent Mechatronics. More details on the talk are available at this link.
May 20, 2021 – Invited Talk at Dynamic Walking 2021
Dr. Lenzi presents the latest results of our powered prosthetics research at Dynamic Walking 2021, during the first Episode of the conference entitled “(Bio)Mechanics”. More details on the talk are available at this link. A video recording of the talk is available at this link.
April 2, 2021 – Plenary Lecture at the 11th Rocky Mountain ASB conference
Dr. Lenzi was invited to give the plenary lecture at the 11th Annual meeting of the Rocky Mountain American Society of Biomechanics. More information on the talk can be found at this link.
March 8, 2021 – New paper published in IEEE Transactions on Neural Systems and Rehabilitation Engineering
Our paper entitled “Self-Aligning Mechanism Improves Comfort and Performance With a Powered Knee Exoskeleton” was published in the IEEE Transactions on Neural Systems and Rehabilitation Engineering. In this study, we demonstrate for the first time the efficacy of self-aligning mechanisms in improving comfort and performance with a powered exoskeleton. Experiments were conducted with 14 able-bodied subjects performing sit-to-stand transfers and a position tracking task with our powered knee exoskeleton with the self-aligning mechanism locked and unlocked. Our results demonstrate up to 15.3% increased comfort and 38% improved performance when the self-aligning mechanism was unlocked. The manuscript is available online at this link.
March 01, 2021 – Dr. Lenzi received the 2020 NSF CAREER Award
Professor Tommaso Lenzi has been awarded a National Science Foundation Faculty Early Career Development Program (CAREER) award. The CAREER program is one of the NSF’s most prestigious award programs, offering 5 years of support to early-career faculty with the potential to serve as academic role models in research and education. The research grant, entitled “Bio-inspired Multi-joint Design and Control for Efficient and Lightweight Wearable Robots” will provide new knowledge related to wearable robotics by using bio-inspired actuation systems that concurrently assist multiple joints, much like human muscles. Read more here.
February 19, 2021 – Invited Talk at the University of Michigan, Ann Arbor
Dr. Lenzi presents the latest results of research at the Winter 2021 Seminars organized by the Department of Electrical and Computer Engineering of the University of Michigan, Ann Arbor. More details on the talk are available at this link. A video recording of the talk is available at this link.
January 29, 2021 – Jake George received the Translational Science 2021 Award
Jake George (former postdoctoral fellow, now faculty in PM&R and ECE at Utah) has received the 2021 ACTS Outstanding Trainee: Post-Doctoral Award, which will be conferred during the annual meeting of the Association for Clinical and Translational Science (ACTS), co-supported by the American Federation for Medical Research (AFMR), Association of American Medical Colleges (AAMC), the PhRMA Foundation and Clinical Research Forum (March 30 – April 2, 2021).
November 20, 2020 – The Utah Lightweight Leg is in the News
The Utah Lightweight leg, developed by our lab, was featured in a health news story originally covered by IVANHOE and then several local TV news around the Country. You can watch the videos here, here, here, here, and here.
October 29, 2020 – Workshop on Robotic Leg Prostheses for the IEEE/RSJ IROS 2020
We have organized a virtual workshop on robotic leg prostheses for the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2020). The goal of the workshop is to better understand and discuss the challenges in robotic leg prostheses. The workshop website presents a collection of invited talks from world-renown scientists and video demonstrations of some of the most advanced robotic-powered prostheses in the world.
September 05, 2020 – Our Prosthetics Research is Featured in the O&P Almanac
The O&P Almanac dedicated a full page of their September issue to talk about our work in powered prosthetics. The O&P Almanac is the most respected source for industry insight and association news in the orthotic and prosthetic industry. Featured topics include emerging technologies, coding and reimbursement education, premier meetings, people and businesses in the news, and industry modernization. You can read the article here.
{kind=link}
July 22, 2020 – Our Adaptive Prosthesis Controller is Published on Science Robotics
Our paper entitled “Powered knee and ankle prosthesis with indirect volitional swing control enables level-ground walking and crossing over obstacles” is published in Science Robotics. In this study, we present an adaptive controller for powered knee and ankle prostheses that automatically adapts to the movements of the users giving them volitional control over foot clearance. Tests with three individuals with an above-knee amputation show that our new controller enables them to walk and cross over obstacles up to 20 cm tall. The link to the manuscript coming soon!
June 1, 2020 – Jake George joins the Bionic Engineering Lab as a Postdoctoral Fellow
Jake George, Ph.D., joins the Bionic Engineering Lab with a postdoctoral fellowship from the Utah Center for Clinical and Translational Science. Jake has a PhD from the Department of Bioengineering at the University of Utah, where he worked with Dr. Greg Clark on bi-directional neural interfaces for individuals with upper-limb amputations. At the Bionics Lab, his work will merge neural engineering and AI to advance the performance of powered exoskeletons for individuals with lower-limb impairments.
May 21, 2020 – Data Descriptor published in Nature Scientific Data
We published the first openly available biomechanics dataset of 18 individuals with above-knee amputation walking at 5 different speeds. The full dataset, including raw marker data and processed kinetic and kinematic profiles, is free to download at this link. The peer-reviewed paper describing the data can be found at this link. This research was supported by the Department of Defense through the Congressionally Directed Medical Research Program.
May 1, 2020 – New paper published in the IEEE Transactions on Medical Robotics and Bionics
Our paper entitled “Design, Development, and Validation of a Self-Aligning Mechanism for High-Torque Powered Knee Exoskeletons” was published in the IEEE Transactions on Medical Robotics and Bionics. In this study, we present a powered knee exoskeleton with a lightweight (190 g) and strong (~120 Nm) self-aligning mechanism. Human experiments show that even when intentional misalignments are introduced between the user and the exoskeleton, the spurious torques and forces on the user’s articulation are <0.5 Nm and <5N with >40Nm knee flex torque. The manuscript is available online at this link. The video accompanying the paper can be found here.
March 23, 2020 – New paper published in the IEEE Robotics and Automation Magazine
Our paper entitled “A Compact, Lightweight Robotic Ankle-Foot Prosthesis Featuring a Powered Polycentric Design” was published in the IEEE Robotics and Automation Magazine for the special issue on Wearable Robotics. In this study, we show that a polycentric design enables a lighter and more compact powered ankle than common monocentric design (1.3 kg with battery, electronics, and covers, 12 cm build height). Experiments with two individuals with below-knee amputation show the performance of the proposed design during walking and stair ascent. The manuscript is available online at this link. The video accompanying the paper can be found here.
March 7, 2020 – Presenting a Case Series on Our Powered Prosthesis at AAOP 2020 in Chicago
Tommaso Lenzi and Luksa Gabert will attend the 46th Academy Annual Meeting & Scientific Symposium of the America Academy of Orthetists and Prosthetists (AAOP 2020) to present our most recent work on powered prosthetics. The presentation will focus on the work described in the accepted abstract entitled “Stair ambulation with a lightweight powered knee and ankle prosthesis across functional classification levels: A case series”. The abstract, authored by Sarah Hood, Lukas Gabert, Minh Tran, and Tommaso Lenzi can be found at this link.
January 06, 2020 – Kai Pruyn joins the Bionic Engineering Lab with an ACCESS Fellowship
Kai Pruyn joins the Bionic Engineering Lab as an undergraduate student assistant. Kai has received the ACCESS Fellowship program at the University of Utah. ACCESS provides freshmen and transfer students, from a variety of backgrounds, with a supportive path into STEM degrees and careers. ACCESS welcomes all students who are committed to advancing gender equity in science and engineering. With a vision of greater inclusion, diversity, and accessibility across STEM fields, ACCESS works for students today and the workforce of tomorrow. Find more info on the ACCESS program here.
November 26, 2019 – Demonstrating our Bionic Leg at the Limb Difference Night at Microsoft City Creek Mall
The Bionic Engineering Lab will be at the “Limb Difference Night” a GAIA event hosted by Microsoft at the City Creek Mall (51 S. MAIN ST. SUITE 145). Alec, one of our study participants, will demonstrate the Utah Bionic Leg and be available to answer questions and curiosities about his experience with this new prosthesis technology. BE Lab members will show our power exoskeletons. Dr. Lenzi will participate in a panel discussion about limb difference and the impact of technology. You can find a flyer for the event here.
September 19, 2019 – New Research Grant from the National Institute of Health!
We have received a new $2.2M grant from the National Institute of Health (NIH) entitled “Lightweight Powered Prosthesis for Above-knee Amputees”. The grant has been awarded by the Eunice Kennedy Shriver National Institute of Child Health and Human Development. The goal of this project is to understand how a powered knee and ankle prosthesis can help individuals with above-knee amputations to transition from limited to full community ambulation. See media coverage here and here.
August 28, 2019 – Freethink Media Releases a Documentary about Our Work
This summer Feethink Media visited our lab to document the development of our advanced bionic leg prosthetics as part of their SuperHuman series. The video also tells the story of Alec, an inspiring person we have the pleasure to work with as we push the limits of bionics. You can read more here and watch the episode here
August 20, 2019 – New Research Grant from the NSF through the National Robotics Initiative!
We have received a new $1.2M grant from the National Science Foundation (NSF) entitled “Muscle Ultrasound Sensing for Intuitive Control of Robotic Leg Prostheses”. The grant has been awarded through the National Robotics Initiative (NRI) and is a collaborative effort with Drs. Nicholas Fey and Kenneth Hoyt at the University of Texas at Dallas. The goal of this project is to make powered knee and ankle prostheses more intuitive and robust to use in real-world settings. To this end, we will integrate muscle ultrasound sensing in the adaptive control of our lightweight robotic prosthesis.
August 13, 2019 – Dante Archangeli and Grace Hunt win COE Fellowships and join the Bionic Engineering Lab
Dante Archangeli (Ph.D. student, College of Engineering Fellowship Awardee) and Grace Hunt (Ph.D. student, Campbell Fellowship Awardee) join the Bionic Engineering Lab to work on new projects related to the design and control of wearable robotic devices.
August 2, 2019 – Andy Gunnell wins UROP Scholarship
Congratulations to Andy Gunnell (undergraduate BE Lab member) for winning the UROP scholarship with a project titled: “Gait and balance analysis of amputees using an advanced prosthetic leg”.
July 3, 2019 – New paper published in the IEEE Sensors Journal
Our paper entitled “ Instrumented Pyramid Adapter for Amputee Gait Analysis and Powered Prosthesis Control” was published in the IEEE Sensors Journal. The instrumented pyramid can accurately measure up to 120Nm of torque and 2500N of force. It also integrates a 9-axis IMU to measure the orientation of the prosthesis in space and its accelerations. The sensor weighs only 150g including the electronic boards. The manuscript describing this work is available online at this link. The video accompanying the paper can be found here.
June 25, 2019 – Marshall Ishmael and Sarah Hood presenting at ICORR 2019 during the RehabWeek 2019
Marshall Ishmael will present our preliminary work on Hope, our lightweight powered hip exoskeleton, at ICORR 2019 in Toronto, Canada. His podium presentation will focus on the design of this novel exoskeleton and its preliminary validation for walking assistance in individuals with above-knee amputations. A video of the experiments can be found here.
Sarah Hood will present the results of our pilot studies using Romeo and Juliet, our powered ankle and knee prosthesis, with limited community ambulators. For the first time, this study shows that a powered prosthesis has the potential to improve ambulation in elderly and dysvascular above-knee amputees. A video of the experiments can be found here.
May 20, 2019 – Minh Tran presenting at ICRA 2019
Minh Tran will present at ICRA 2019 on Juliet, our lightweight powered knee prosthesis. The presentation will focus on the modeling, implementation, and testing of the actively variable transmission system, which is the key technology enabling Juliet to match, for the first time, the weight of passive knee prostheses. The paper is available online at this link. The video submission can be found here.
May 12, 2019 – Justin Francis wins UROP Scholarship
Congratulations to Justin Francis (undergraduate BE Lab member) for winning the UROP scholarship with a project titled: “Power Polycentric Ankle”.
April 16, 2019 – Our research featured in the Spring Newsletter of the ME Department
Our research was on the cover of the Spring Newsletter of the Mechanical Engineering Newsletter. Find more info at this link.
March 27, 2019 – Invited Talk at WeraRAcon 2019
Dr. Lenzi will present on the design of the Utah Lightweight Leg and its preliminary validation with individuals with above-knee amputations at the Annual Conference of the Wearable Robotics Association (WearRAcom 19). The agenda of the meeting can be found at this link.
February 12, 2019 – New paper published in the IEEE/ASME Transactions on Mechatronics
Our paper entitled “Design, Development, and Validation of a Lightweight Non-backdrivable Robotic Ankle Prosthesis” was published in the IEEE/ASME Transactions on Mechatronics. The manuscript preprint is available online at this link. The video accompanying the paper can be found here.
January 10, 2019 – New paper published in the IEEE Robotics and Automation Letters
Our paper entitled “A Lightweight, Efficient Fully-Powered Knee Prosthesis with Actively Variable Transmission” and led by Minh Tran was published in the IEEE Robotics and Automation Letters. The manuscript is available online at this link. The video accompanying the paper can be found here.
December 11, 2018 – Andy Gunnell wins UROP Scholarship
Congratulations to Andy Gunnell (undergraduate BE Lab member) for winning the UROP scholarship with a project titled: “Gait and balance analysis of amputees using an advanced prosthetic leg”.
October 24, 2018 – Hosting SKY’S THE LIMB-IT support group
We are excited to host SKY’S THE LIMB-IT, a support group helping amputees at any stage of their recovery adjust to living with an amputation and designed for people with amputations, family members, and caregivers. The support group meets monthly and is organized by Spencer Thompson from the amputee program at Sugar House Rehabilitation Clinic. Find more info about the meeting on this flyer.
October 4, 2018 – Our bionic leg research featured in PC Magazine
Our research on the bionic leg prosthesis was featured in a PC Magazine story entitled, “How Advanced Prosthetics Turned This Man Into an ‘Emerging Cyborg.” by S. C. Stuart. Subscribe to our YouTube Channel for more research videos!
September 22, 2018 – Hosting Professor Maurizio Porfiri from NYU
NYU Department of Mechanical and Aerospace Engineering Professor Maurizio Porfiri will visit the Department of Mechanical Engineering and give a talk for our Distinguished Seminar Series. More details on the talk can be found here.
July 25, 2018 – Paper published in The International Journal of Robotics Research
Our paper entitled “Design, development, and testing of a lightweight hybrid robotic knee prosthesis” is now published in The International Journal of Robotics Research. The manuscript is available online at this link. More info on this project can be found here.
June 26, 2018 – Utah ExoKnee showcased at 2018 ASEE Annual Conference and Exposition
The Utah ExoKnee was among the few undergraduate engineering projects to be selected for the 2018 ASEE Annual Conference and Expositions. ASEE is committed to fostering the exchange of ideas, enhancing teaching methods and curriculum, and providing prime networking opportunities for engineering and technology education stakeholders such.
May 10, 2018 – Accepting applications for a paid summer internship in collaboration with Ottobock USA
Ottobock USA will sponsor a summer internship in collaboration with the Bionic Engineering Lab. This position is split time between the Ottobock SLC R&D facility and the Bionic Engineering Lab at the UofU. This unique opportunity provides the experience of working for the world leader in prosthetics coupled with cutting-edge academic research. More info and how to apply can be found here.
April 19, 2018 – Utah ExoKnee presented at Spring 2018 Design Day
Undergrad BELab members Abby, Nate, Polly, and Sergei will present and demonstrate the Utah ExoKnee, a powered exoskeleton for assistance and rehabilitation. Check it out here.
April 6, 2018 – Paper accepted to EMBC’18!
Our paper entitled “Preliminary analysis of positive knee energy injection in a transfemoral amputee walking with a powered prosthesis” was accepted to the 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC’18) to be held at the Honolulu, HI, USA, July 17-21, 2018. Congrats Sarah!
March 22, 2018 – Invited Talk at WeraRAcon 18
Dr. Lenzi will present our ongoing research on the design and control of lightweight robotic prostheses for individuals with lower-limb amputations at the Annual Conference of the Wearable Robotics Association (WearRAcom 18). The invited talk will be part of the Breakout Session 8, Medical/Rehabilitation( Prosthetics).
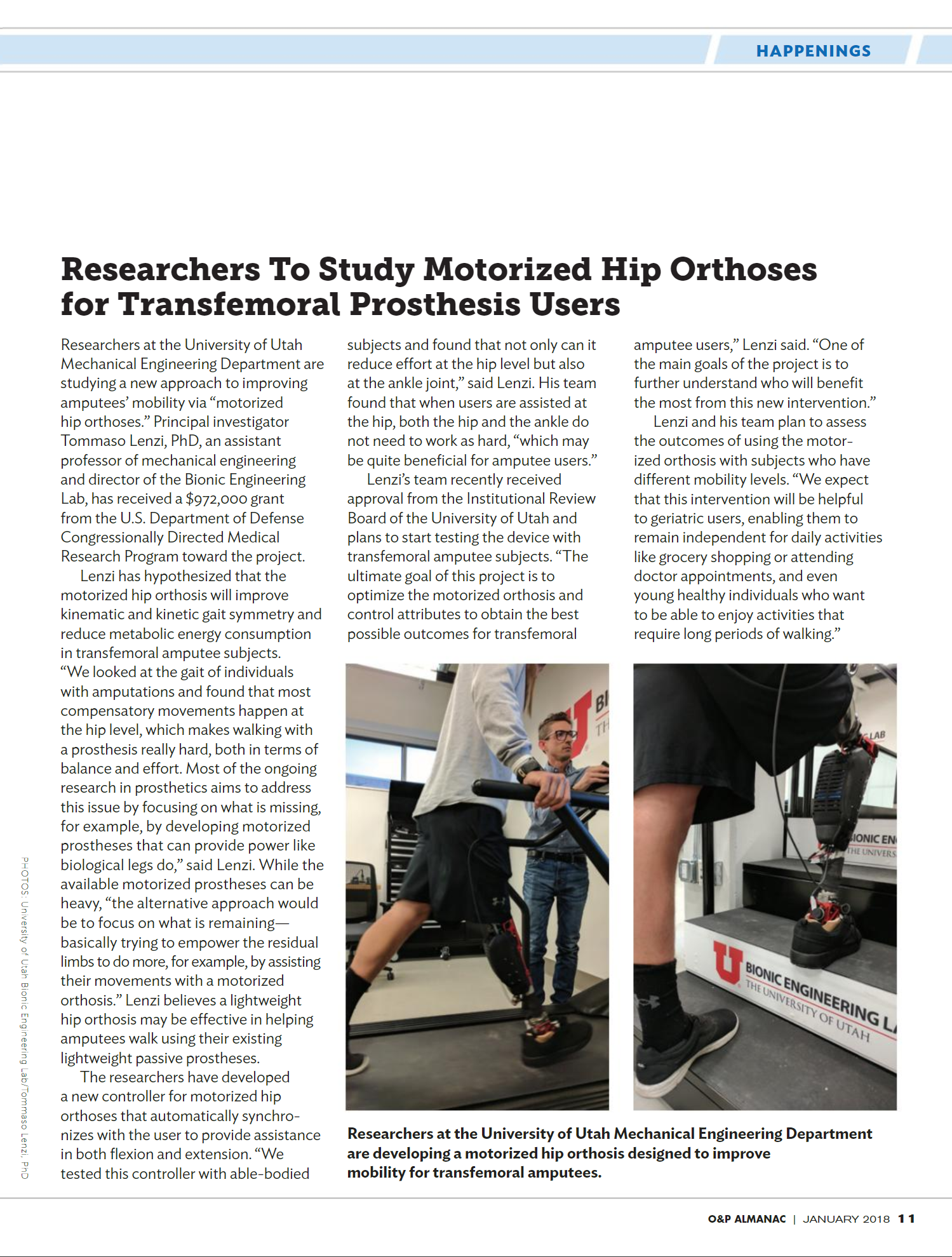
January 16, 2018 – Research featured in the O&P Almanac
Our research was featured in the January issue of the Orthotic and Prosthetics Almanac of the American Orthotic and Prosthetic Association. You can read the article here.
{kind=link}
January 1, 2018 – Our YouTube Channel is online!
Our YouTube Channel is online! Check out our latest research videos here.
December 1, 2017 – Hosting Professor Kevin Lynch from Northwestern University
Neuroscience and Robotics Lab Professor Kevin Lynch will visit the Department of Mechanical Engineering and give a talk for our Distinguished Seminar Series. More details on the talk can be found here.
November 27, 2017 – Invited Seminar at Vanderbilt University
Dr. Lenzi will present our ongoing research on the design and control of lightweight robotic prostheses for individuals with lower-limb amputations at the Department of Mechanical Engineering of Vanderbilt University on November 27, 2017.
October 30, 2017 – New Research Grant from the Department of the Defense!!!
Dr. Lenzi (PI) receives a new $985K grant from the Department of the Defense titled “Motorized Hip Orthoses to Improve the Gait Ability of Transfemoral Amputees”. The grant has been awarded through the Congressionally Directed Medical Research Program, which aims to address the most significant gaps in care for leading burden of injury and loss of fitness for military duty by funding innovative, high-impact, clinically relevant research to advance optimal treatment and rehabilitation from musculoskeletal injuries sustained during combat and combat-related activities. See the news on O&P EDGE.
August 21, 2017 – Sarah Hood and Minh Tran join the Bionic Engineering Lab
Sarah Hood (PhD student) and Minh Tran (PhD student) join the Bionic Engineering Lab. Their bio and project info will be posted soon!
July 5, 2017 – Sharath Patlolla joins the Bionic Engineering Lab
Sharath Patlolla, BS student in Mechanical Engineering at BTIS Pilani (India), joins the Bionic Engineering lab for his bachelor thesis. Sharath will work on inertial measurement units and dead reckoning algorithms applied to smart prosthesis control and gait analysis.
June 15, 2017 – Paper accepted to IROS 2017!
Our paper entitled “Design, Development, and Bench-top Testing of a Powered Polycentric Ankle Prosthesis” was accepted to the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems that will be held in Vancouver on September 24–28, 2017. PDF and video will be posted soon!
May 17, 2017 – Ayana Beatty joins the Bionic Engineering Lab
Ayana Beatty, BS student in mechanical engineering and electronic arts at Rensselaer Polytechnic Institute, joins the Bionic Engineering Lab as a Student Intern. Ayana’s work will support the ongoing research activities on the Powered Polycentric Ankle.
May 1, 2017 – Sergei Sarkisian joins the Bionic Engineering Lab
Sergei Sarkisian (ME student) joins the Bionic Engineering Lab as an undergraduate research assistant. Sergei will work on the design of a new powered exoskeleton.
April 25, 2017 – Paper accepted to ICORR 2017!
Our paper entitled “A Lightweight Robotic Ankle Prosthesis with Non-backdrivable Cam-based Transmission” was accepted to the 15th IEEE International Conference on Rehabilitation Robotics (ICORR 2017) that will be held in London on July 17-20. PDF and video will be posted soon!
April 19, 2017 – Invited Talk at WearRAcon 17
Dr. Lenzi will give an invited talk at the second annual conference of the Wearable Robotics Association (WearRA) that will take place on April 19 – 21, 2017 at the HYATT REGENCY PHOENIX. The invited talk will be part of the Breakout Session 6, Modular Wearable Robotics, and will focus on our research on lightweight powered prosthesis design.
April 7, 2017 – Hosting Professor Neville Hogan from MIT
MIT Mechanical Engineering & Brain & Cognitive Sciences Professor Neville Hogan will visit the Department of Mechanical Engineering and give a talk for our Distinguished Seminar Series. More details on the talk can be found here.
March 3, 2017 – Selected for podium presentation at Design of Medical Devices Conference (DMD 2017)
Our submission entitled “Hybrid Actuation Systems for Lightweight Transfemoral Prostheses” was among the few contributions selected for podium presentation at the Design of Medical Devices Conference (DMD 2017) that will take place in Minneapolis, MN, on April 10-13, 2017.
January 25, 2017 – Paper accepted to ICRA 2017!
Our paper entitled “Actively Variable Transmission for Robotic Knee Prostheses” was accepted to ICRA 2017. PDF and video will be posted soon!
January 6, 2017 – Sarvenaz Chaeibakhsh, Lukas Gabert, and Marshall Ishmael join the Bionic Engineering Lab
Lukas Gabert (MS student), Marshall Ishmael (PhD student), and Sarvenaz Chaeibakhsh (PhD student) join the Bionic Engineering Lab. Find more info on their projects and bios here.
January 1, 2017 – University of Utah Welcome New Assistant Professor Tommaso Lenzi
The University of Utah’s Department of Mechanical Engineering is pleased to announce the arrival of assistant professor Tommaso Lenzi. Check out Tommaso’s interview on the Department of Mechanical Engineering website.