Abstract
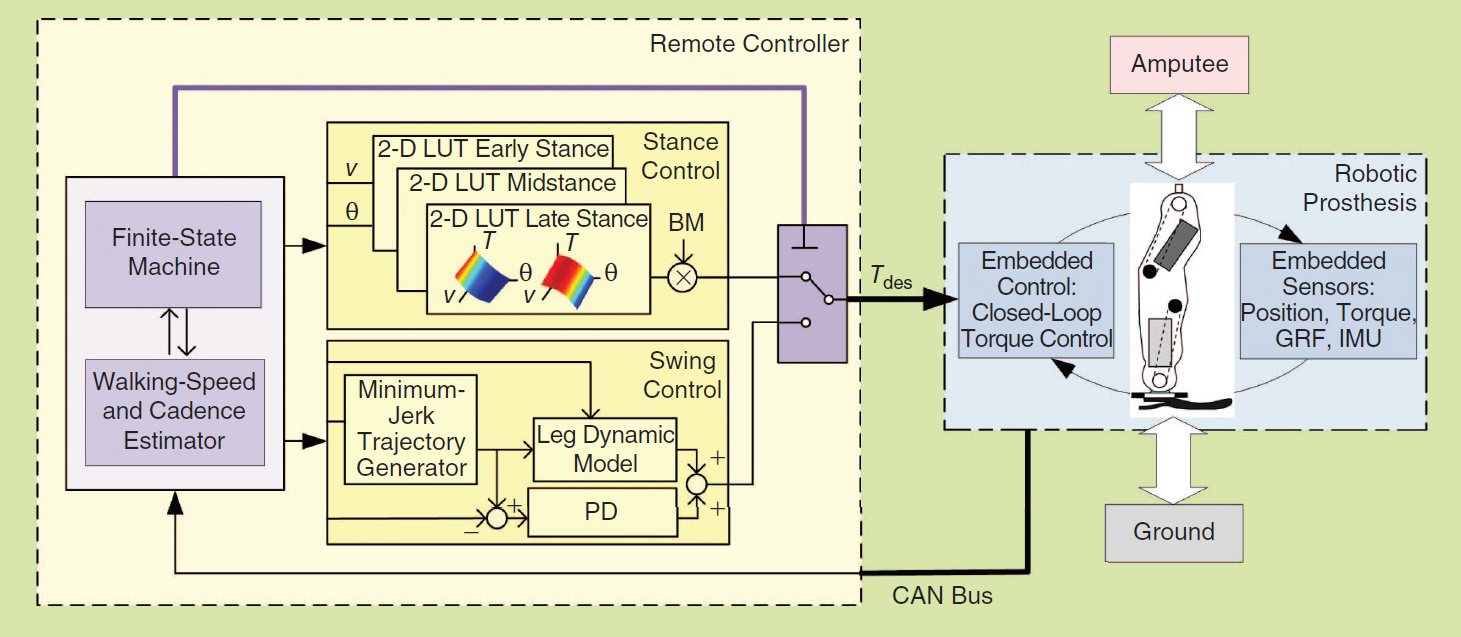
We developed a novel control architecture for robotic leg prostheses that adapts online at each step to provide biological accurate function based on the user gait pattern. The user-adaptive control can restore physiological joint energetics and does not require any tuning–the user can don the robotic leg and go. The movement of the prosthesis during swing phase is adapted to the user online using minimum-jerk principle. Minimum-jerk provides an optimal way to program a smooth movement, allowing amputees to obtain physiological gait symmetry at variable cadences, and, potentially, to handle unexpected perturbations such as tripping. This controller was first tested on the Vanderbilt leg–a state of the art powered ankle and knee prosthesis developed by Dr. Michael Goldfarb at Vanderbilt University.
Variable Cadence Contol – Amputee testing
https://youtu.be/kDb_L_zJlDg
Crossing over obstacles – Amputee testing
https://youtu.be/K4EMpooTjmQ