

Abstract
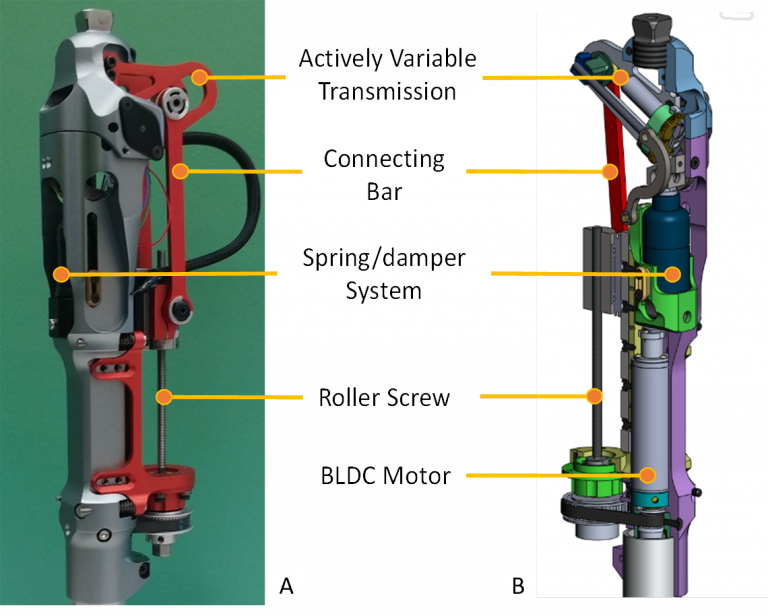
We developed a novel hybrid actuation system for robotic knee prosthesis that combines a conventional passive spring/damper system with an innovative variable transmission based on slider-crank design. The Hybrid Knee is as lightweight as a passive device, and as strong as a heavy fully-powered prosthesis, helping subjects to stand up from a sited position and to ambulate on stairs.
Preliminary validation with a transfemoral amputee subject
Switching between Active and Passive mode
In Collaboration with Drs. Levi Hargrove and Todd Kuiken at the Rehabilitation Institute of Chicago